排线接通
先需要使用树莓派摄像头ffc排线,连接树莓派摄像头与树莓派开发板,其中排线连接的接口被称为CSI(Camera Serial Interface)接口。
树莓派板的CSI接口位于USB和以太网接口旁。我们先将CSI接口的黑色挡板拔开,后将排线蓝色一端正对以太网接口方向插入,之后按下黑色挡板进行固定。
同样连接摄像头一端,排线的蓝色端与摄像头背面保持相同方向。
摄像头激活
SSH到树莓派终端,对系统进行更新。
sudo apt-get update sudo apt-get upgrade
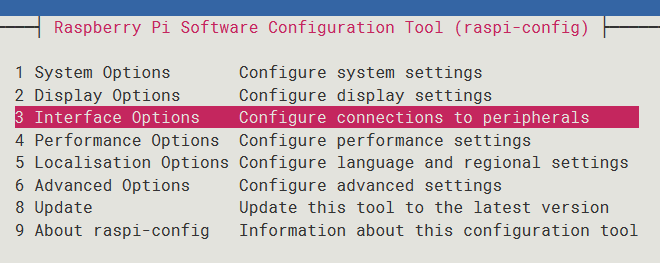
sudo raspi-config
打开树莓派的摄像头功能。
 打开后使用reboot命令重启树莓派,至此摄像头已经能够在树莓派上使用。
打开后使用reboot命令重启树莓派,至此摄像头已经能够在树莓派上使用。
查看接入情况
vcgencmd get_camera
supported=1 detected=1, libcamera interfaces=0
vcgencmd命令检查相机,supported表示是否支持相机,如为0,需要检查一下系统升级。而detected表示是否连接好了相机,如是0,请检查相机连线是否正确,摄像头和底板是否安装好。libcamera interfaces表示libcamera 驱动是否正常;
实时监控
sudo apt-get install motion
修改配置文件:
sudo nano /etc/motion/motion.conf
daemon on #off改成on
width 640
height 480 #根据摄像头像素自行更改
framerate 50 #帧率
stream_maxrate 200
stream_localhost off #设为off,允许局域网内所有用户访问
重启motion
sudo service motion restart
启动
sudo motion
FEATURED TAGS
Agent
大模型
ChatGPT
HA
智能家居
LSM
Linux
Dapr
开发
插件
Linux,虚拟机,ubuntu
缓存
图片
Flink
反射
内置函数
go
限流
大数据,Spark,Kafka
面向对象
镜像
docker,hadoop,镜像
kafka,java
求导
链式法则
微积分
源码
快照
协议
ZooKeeper
ZAB
tomcat
Hadoop
Spark
python
自动微分
React Native
React
Node.js
Android
Kafka
lambda
jvm
rasp
框架
SPI
asm
maven
idea
依赖管理
module
helm
逻辑回归
S函数
IOS
Fiddler
Andriod
Protocol Buffer
kryo
车联网,大数据,神经网络
字节序
最小二乘法
线性代数
线性回归
最大似然法
网络编程
大数据
树莓派
Raspbian
redis
海南
分析
人口
函数式编程
clojure
线程
并行
actor
红黑树
数组
动态数组
tcp
编程
markdown
二叉搜索树
AVL树
数据结构
golang
梯度下降法
skaffold
k8s
机器学习
选法
一致性
算法
分布式
paxos
Raft
一致性协议
引擎
容器
通信
微服务
Kubernetes
docker
文件系统
NFS
神经网络
神经元
深度学习
poi
反向传播
java
并发模型
并发
多线程
Scala